Реверсирование электродвигателей | Все своими руками
Здравствуйте дорогие читатели. Частенько в любительских самодельных устройствах используются различного рода двигатели. В зависимости от предназначения, двигатели в этих устройствах, согласно конструкторскому замыслу должны вращаться в обе стороны.
То есть схемы их включения должны предусматривать реверсирование. Самое простой реверс имеют двигатели постоянного тока с возбуждением от постоянных магнитов. Поменял концы проводов питания местами и все – движок вращается в другую сторону. Поэтому и схемы реверсирования для этих двигателей простые.
А как быть с другими двигателями? Вот об этом и поговорим.
Двигатель Д5-ТР
Двигатель с электромагнитным возбуждением. Двигатель имеет разные варианты исполнения и схем включения, но какие бы они не были, нам нужны всего четыре конца – два от статорной обмотки и два от роторной, т.е. от коллекторных щеток.
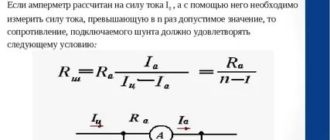
Для того, чтобы такие двигатели вращались в другую сторону, необходимо, чтобы полярность питающего напряжения на одной из обмоток оставалась постоянной, а полярность другой менялась на противоположную. Схема включения этого, как и любого другого с электромагнитами, показана на рис.1.
Здесь постоянную полярность включения имеет статорная обмотка (обмотка возбуждения), что обеспечивается применением выпрямительного моста, а полярность роторной можно менять. Теперь реверс производится так же переполюсовкой напряжения питания.
Двигатель ЭДГ-2
Двигатель ЭДГ-1 раньше применялся в ЭПУ – электропроигрывающих устройствах. Двигатели типа ЭДГ-2 применялись в магнитофонных приставках. Эти двигатели рассчитаны на работу в сети переменного тока напряжением 127В.
Но поменяв схему включения[1] обмоток и фазосдвигающего конденсатора, их можно питать и от сети напряжением 220В. Схема включения двигателей с реверсированием и его управлением показана на рисунке 2. «Лево», «Право» на схеме поставлены для виду. Все зависит от того, как первоначально подключить концы обмоток.
Не понравится сторона, в которую первоначально крутится двигатель – перекиньте концы одной из обмоток.
Двигатель АВЕ – 071 – 4С.
Эти двигатели однофазные, асинхронные применялись в стиральных машинах прошлого века и я думаю, что еще переживут и меня с вами. Десятки лет они исправно вертели активатор, стирая белье и еще послужат нашим Самоделкиным. Двигатель имеет четыре вывода от двух обмоток. Одна пусковая, имеющая активное сопротивление 20 ОМ и рабочая с сопротивлением по постоянному току 50 Ом. Схема включения показана на Рис.3.
Двигатель ДАО – ЦУ4.
Этот двигун применялся, а может и применяется в стиральных машинах для вращения центрифуги. Для реверсирования этого двигателя придется разобрать выводную колодку и разъединить провода. Получим так же 4 конца от обмоток. Схема включения показана на Рис.4.
Двигатель ДАО-А
Тоже от стиральных машин. Имеет четыре вывода. Схема включения такая же, как и у предыдущих асинхронных.
Двигатель АОЛБ-22-4 2сер
————————————————————————————————————
Замечательный двигатель – три в одном. Внутри имеет тепловое реле и центробежный механизм отключения пусковой обмотки. Пришлось с ним повозиться, чтобы вам нарисовать схему наиболее понятно. Установка перемычек показана на рис. 5. Схема реверсирования показана на рис. 6.
Термореле РТК-С
В стиральных машинах применяются тепловые (защитные) реле РТ-10 и пускозащитные реле РТК-С, РТК-1, РТК-1-3, РТК-3-О и др. Тепловое реле типа РТ-10 с одним нормально замкнутым контактом служит для защиты от перегрузок электрических установок и однофазных электродвигателей переменного тока с номинальным напряжением до 220 В.
Реле изготовляют на номинальные токи Iн тепловых эле¬ментов 1,2; 1,9; 2,5; 3,3 и 4,3 А. При Iн = 1,1 А реле не срабатывает в течение 30 мин; при Iн = 1,35 А реле срабатывает не более чем через 30 мин; при Iн = 2 А реле срабатывает за 1860 с. Время самовозврата контактов в замкнутое состояние от 30 с до 10 мин.
В реле встроен биметаллический термоэлемент с перекидной пружиной, которая обеспечивает мгновенное размыкание и замыкание контактов. Изоляция реле выдерживает испытательное напряжение 2000 В, приложенное в течение 1 мин. Реле устанавливают в вертикальном положении контакта¬ми вверх, питание подводится к верхнему зажиму.
Реле предназначены для работы в закрытых помещениях при температуре окружающей среды от 0 до 70°С. Это довольно эффективна защита. Так что не пренебрегайте ею, а то себе будет дороже. Ну что еще, а пока все. Удачи всем. До свидания. К.В.Ю.
[1] Радио 2004г. № 6 стр.42 Бурков В. «Как подключить двигатель на 127В к сети 220В».
Источник: http://www.kondratev-v.ru/dvigateli/reversirovanie-elektrodvigatelej.html
Реверс электродвигателя
Для электродвигателя режим работы с периодическим изменением направления вращения (реверсирование) является наиболее благоприятным. По той причине, что ликвидируется паразитное намагничивание, вызывающее перегрев и потерю мощности электрической машиной.
Кроме того, схемы реверсивного пуска намного проще, чем механические трансмиссии, состоящие из системы зубчатых шестерней. Наибольшее число вопросов вызывает способ изменения направления вращения двигателей переменного тока, ведь изменить полярность питающего напряжения невозможно.
В этой статье мы представим вам основные схемные решения для запуска асинхронных и коллекторных электродвигателей, в которых предусмотрена возможность их реверсирования.
Реверс трехфазных асинхронных машин
Направление движения вращающегося магнитного поля асинхронных электродвигателей зависит от порядка подачи фаз, независимо от того как соединены его статорные обмотки – звездой или треугольником.
Например, если фазы A, B, C подать на входные клеммы 1, 2 и 3 соответственно, то вращение пойдет (предположим) по часовой стрелке, а если на клеммы 2, 1, и 3, то против нее.
Схема подключения через магнитный пускатель избавит вас от необходимости откручивать гайки в клеммной коробке и производить физическую перестановку проводов.
Трехфазные асинхронные машины на 380 вольт принято подключать магнитным пускателем, в котором три контакта находятся на одной раме и замыкаются одновременно, подчиняясь действию так называемой втягивающей катушки – магнитного соленоида, работающего как от 380, так и от 220 вольт. Это избавляет оператора от близкого контакта с токоведущими частями, что при токах свыше 20 ампер может быть небезопасно.
Для реверсивного пуска используется пара пускателей. Клеммы питающего напряжения на входе соединяются по прямой схеме: 1–1, 2–2, 3–3. А на выходе встречно: 4–5, 5–4, 6–6.
Чтобы избежать короткого замыкания при случайном одновременном нажатии двух кнопок «Пуск» на пульте управления, напряжение на втягивающие катушки подается через дополнительные контакты противоположных пускателей.
Так, чтобы при замкнутой основной группе контактов линия, которая идет на соленоид соседнего прибора, была разомкнута.
На пульте управления устанавливается трехкнопочный пост с однопозиционными – одно действие за одно нажатие – кнопками: одна «Стоп» и две «Пуск». Разводка проводов в нем следующая:
- один фазный провод подается на кнопку «Стоп» (она всегда нормально замкнута) и перемычками с нее на кнопки «Пуск», которые всегда нормально разомкнуты.
- С кнопки «Стоп» два провода на дополнительные контакты пускателей, которые при их срабатывании замыкаются. Так обеспечивается блокировка.
- С кнопок «Пуск» перекрестно по одному проводу на дополнительные контакты пускателей, которые при их срабатывании размыкаются.
Подробнее о схемах подключения магнитных пускателей для трехфазных электродвигателей читайте здесь.
Реверс однофазных синхронных машин
Для запуска этим моторам необходима вторая обмотка на статоре, в цепь которой включен фазосдвигающий элемент, обычно бумажный конденсатор. Реверсировать можно только те, у которых обе статорных обмотки равнозначны – по диаметру провода, числу витков, а также при условии, что одна из них не отключается после набора оборотов.
Суть схемы реверсирования в том, что фазосдвигающий конденсатор будет подключаться то к одной из обмоток, то к другой. Для примера рассмотрим асинхронный однофазный двигатель АИРЕ 80С2 мощностью 2,2 кВт.
В его клеммной коробке шесть резьбовых выводов, обозначенных литерами с цифрами W2 и W1, U1 и U2, V1 и V2. Чтобы двигатель вращался по часовой стрелке, коммутация производится следующим образом:
- Сетевое напряжение подается на клеммы W2 и V1.
- Концы одной обмотки соединяются с клеммами U1 и U2. Чтобы ее запитать, они соединяются перемычками по схеме U1–W2 и U2–V1.
- Концы второй обмотки подключают к клеммам W2 и V2.
- Фазосдвигающий конденсатор подключают к клеммам V1 и V2.
- Клемма W1 остается свободной.
Чтобы вращение происходило против часовой стрелки, изменяют положение перемычек, они ставятся по схеме W2–U2 и U1– W1. Схема автоматического реверса строится так же на двух магнитных пускателях и трех кнопках – двух нормально разомкнутых «Пуск» и одной нормально замкнутой «Стоп».
Реверс коллекторных двигателей
Схема включения его обмоток аналогична той, что используется в двигателях постоянного тока с последовательным возбуждением. Одна токоснимающая щетка коллектора подключается к обмотке статора, а питающее напряжение подается на другую щетку и второй вывод статорной обмотки.
При изменении положения штепсельной вилки в розетке происходит одновременная переполюсовка магнитов ротора и статора. Поэтому направление вращения не изменяется.
Так же, как это происходит в двигателе постоянного тока при одновременном изменении полярности питающего напряжения на обмотке возбуждения и якоря.
Изменить порядок следования фаза – ноль надо только в одном элементе электрической машины – коллекторе, который обеспечивает не только пространственное, но электрическое разделение проводников – обмотки якоря изолированы друг от друга. На практике это выполняется двумя способами:
- Физической переменой места установки щеток. Это нерационально, поскольку связано с необходимостью внесения изменений в конструкцию устройства. Кроме того, приводит к преждевременному выходу щеток из строя, поскольку форма выработки на их рабочем конце не совпадает с формой поверхности коллектора.
- Изменением положения перемычки между щеточным узлом и обмоткой возбуждения в клеммной коробке, а также точки подключения сетевого провода. Можно реализовать с помощью одного многопозиционного выключателя или двух магнитных пускателей.
Не забудьте, что все работы по перестановке перемычек в клеммной коробке или подключению схемы реверсирования должны проводиться при полностью снятом напряжении.
Источник: https://electriktop.ru/baza-znaniy/revers-elektrodvigatelya.html
Управление двигателем постоянного тока через реле с помощью ардуино
Схема подключения:
Позитивный контакт мотора — switch 1 COM input на реле
Отрицательный контакт мотора — switch 2 COM input на реле
9v позитивный контакт на батарейке — switch 1 NO на реле и switch 2 NO на реле
9v отрицательный контакт на батарейке — switch 1 NC и switch 2 NC на реле
Каждый свич на реле имеет три входа. NO (Normally open — в обычном состоянии открыт), COM (Common — общий) and NC (Normally closed — в обычном состоянии закрыт).
В этом проекте оба контакта от мотора подключаются к обоим COM (средним) контактам-входам на переключателях реле.
Позитивный контакт от батарейки 9 В подключаются к обоим NO (верхним) входам.
Отрицательный контакт от батарейки 9 В подключаются к обоим NO (нижним) входам.
Внешнее питание (батарейка 9 В) используется для питания мотора.
Подключаем Arduino
Подключаем:
- Arduino контакт 5v — контакт VCC на модуле реле
- Arduino контакт GND — контакт GND на модуле реле
- Arduino контакт 7 — IN1 на модуле реле
- Arduino контакт 8 — IN2 на модуле реле
После подключения мотора, все что нам остается — запитать сам модуль реле. Для активации переключателей реле мы будем использовать сигналы непосредственно с нашего контроллера — Arduino.
Загружаем скетч на Arduino
Программа и необходимые пояснения к ней:
#define CW 7 // CW инициализируется на контакте 7//
#define CCW 8 // CCW инициализируется на контакте 8//
void setup() { // функция Setup отрабатывает один раз//
pinMode(CW, OUTPUT); // настраиваем CW в качестве выхода//
pinMode(CCW, OUTPUT); // настраиваем CCW в качестве выхода//
}
void loop() { // цикл отрабатывает бесконечное количество раз//
digitalWrite(CW,HIGH); // мотор вращается по часовой стрелке//
delay(1000); // задержка между итерациями на 1 секунду//
digitalWrite(CW, LOW); // мотор останавливается//
digitalWrite(CCW, HIGH);// мотор вращается в против часовой стрелки//
delay(1000); // задержка на 1 секунду//
digitalWrite(CCW, LOW); // мотор останавливается//
}
// конец программы//
Результат!
Если вы все сделали в соответсвии с инструкцией выше, ваш двигатель должен вращаться по часовой стрелке на протяжении 1 секунды, а потом против часовой стрелки тоже на протяжении одной секунды.
Как и в остальных проектах, вы смело можете модифицировать сам скетч и напряжение питания в зависимости от вашего оборудования. При этом логика программы и подключения для работы Arduino с реле и двигателем постоянного тока остается такой же.
инструкция и результат работы на английском языке на видео ниже:
Источник: http://www.electronica52.in.ua/proekty-arduino/upravlenie-dvigatelem-postoyannogo-toka-cherez-rele-s-pomocshu-arduino
Cхема и принцип работы электродвигателя постоянного тока
Июль 1, 2014
40326 просмотров
Моторы, работающие на постоянном токе редко встречаются в домашнем хозяйстве. Но они всегда стоят во всех детских игрушках, работающих от батареек, которые ходят, бегают, ездят, летают и т. п. Двигатели постоянного тока (ДПТ) устанавливаются в автомобилях: в вентиляторах и различных приводах. Они почти всегда используются на электротранспорте и реже в производстве.
Преимущества ДПТ по сравнению с асинхронными моторами:
- Хорошо поддаются регулировке.
- Отличные пусковые свойства.
- Частоты вращения могут быть более 3000 об/мин.
Недостатки ДПТ:
- Низкая надежность.
- Сложность изготовления.
- Высокая стоимость.
- Большие затраты на обслуживание и ремонт.
Далее Я постараюсь кратко и доступно в одной статье изложить схемы, принципы работы, регулировки и реверса двигателей постоянного тока.
Принцип действия электродвигателя постоянного тока
Устройство двигателя аналогично синхронным двигателям переменного тока. Повторяться не буду, если не знаете, тогда смотрите в этой нашей статье.
Любой современный электромотор работает на основе закона магнитной индукции Фарадея и «Правила левой руки». Если к нижней части обмотки якоря подключить электрический ток в одном направлении, а к верхней- в обратном- он начнет вращаться. Согласно правилу левой руки, проводники, уложенные в пазах якоря, будут выталкиваться магнитным полем обмоток корпуса ДПТ или статора.
Нижняя часть будет выталкиваться вправо, а верхняя – влево, поэтому якорь начнет вращаться до момента пока части якоря не поменяются местами. Для создания непрерывного вращения необходимо постоянно менять местами полярность обмотки якоря. Чем и занимается коллектор, который при вращении коммутирует обмотки якоря. Напряжение от источника тока подается на коллектор при помощи пары прижимных графитовых щеток.
Принципиальные схемы электродвигателя постоянного тока
Если двигатели переменного тока довольно просто подключаются, то с ДПТ все сложнее. Вам необходимо знать марку мотора, и затем в интернете узнавайте про его схему включения.
Чаще всего у средних и мощных моторов постоянного тока есть в клеммной коробке отдельные выводы от якоря и от обмотки возбуждения (ОВ). Как правило, на якорь подаётся полное напряжение электропитания, а на обмотку возбуждения -регулируемый ток реостатом или переменным напряжением. От величины тока ОВ и будут зависеть обороты ДПТ. Чем он выше, тем быстрее скорость вращения.
В зависимости от того как подключен якорь и ОВ, электродвигатели бывают с независимым возбуждением от отдельного источника тока и с самовозбуждением, которое может быть параллельным, последовательным и смешанным.
На производстве применяются двигатели с независимым возбуждением ОВ, которая подключается к отдельному от якоря источнику питания. Между обмотками возбуждения и якоря нет электрической связи.
Схема подключения с параллельным возбуждением по своей сущности аналогична схеме с независимым возбуждением ОВ. С той лишь разницей, что отпадает необходимость в использовании отдельного источника питания. Двигатели при включении по обоим этим схема обладают одинаковыми жесткими характеристиками, поэтому применяются в станках, вентиляторах и т. п.
Моторы с последовательным возбуждением применяются, когда необходим большой пусковой ток, мягкая характеристика. Они применяются а трамваях, троллейбусах и электровозах. По этой схеме обмотки возбуждения и якоря подключаются между собой последовательно.
При подаче напряжения токи в обоих обмотках будут одинаковы. Главный недостаток заключается в том, что при уменьшении нагрузки на вал меньше 25% от номинала, происходит резкое увеличение частоты вращения, достигающее опасных для ДПТ значений.
Поэтому для безотказной работы необходима постоянная нагрузка на вал.
Иногда применяются ДПТ со смешанным возбуждением, при котором одна обмотка ОВ соединяется последовательно якорной цепи, а другая параллельно. В жизни редко встречается.
Реверсирование двигателей постоянного тока
Что бы изменить направление вращение ДПТ с последовательным возбуждением необходимо поменять направления тока в ОВ или обмотке якоря. Практически, это делается изменением полярности: меняем плюс с минусом местами. Если же поменять одновременно полярность в цепях возбуждения и якоря, тогда направление вращения не изменится. Аналогично делается реверс и для моторов, работающих на переменном токе.
Реверсирование ДПТ с параллельным или смешанным возбуждением лучше производить изменением направления электрического тока в обмотке якоря. При разрыве обмотки возбуждения, ЭДС достигает опасных величин и возможен пробой изоляции проводов.
Регулирование оборотов двигателей постоянного тока
ДПТ с последовательным возбуждением проще всего регулировать переменным сопротивлением в цепи якоря. Регулировать можно только на уменьшение числа оборотов в соотношении 2:1 или 3:1.
При этом происходят большие потери в регулировочном реостате (R рег). Данный метод используется в кранах и электрических тележках, у которых бывают частые перерывы в работе.
В других случаях используется регулировка оборотов вверх от номинала при помощи реостата в цепи обмотки возбуждения, как показано на правом рисунке.
ДПТ с параллельным возбуждением так же можно регулировать частоту оборотов вниз при помощи сопротивления в цепи якоря, но не более 50 процентов от номинала. Опять же будет нагрев сопротивления из-за потерь электрической энергии в нем.
Увеличить же обороты максимум в 4 раза позволяет реостат в цепи ОВ. Самый простой и распространенный метод регулировки частоты вращения.
На практике в современных электромоторах данные методы регулировки из-за своих недостатков и ограниченности диапазона регулирования редко применяются. Используются различные электронные схемы управления.
Источник: http://jelektro.ru/elektricheskie-terminy/shemy-dvigatelja-postojannogo-toka.html
Принцип работы коллекторного двигателя постоянного тока
Простые и надежные, коллекторные двигатели постоянного тока обеспечивают высокий момент на небольших скоростях и являются хорошей базой для создания приводов и готовых сервосистем с обратной связью.
Коллекторные двигатели постоянного тока — рабочие лошадки промышленности. Они простые, надежные, экономичные. Эти двигатели обеспечивают хорошую регулировку на малых оборотах и, что более важно, высокий крутящий момент на низких скоростях. В связи с этим, при добавлении закрытого контура обратной связи, они могут успешно использоваться при решении задач управления движением.
Давайте взглянем ближе на базовую теорию коллекторных двигателей постоянного тока. Для более удобного и легкого восприятия статья разбита на две части. В этой первой части рассмотрены базовые законы электродинамики, которые лежат в основе работы коллекторных двигателей постоянного тока.
Простая модель — принцип двигателя постоянного тока
Закон Ампера говорит нам о том, что проводник с током генерирует магнитное поле (B-поле), ориентацию которого можно определить по правилу правой руки: если расположить правую руку так, чтобы большой палец указывал вдоль проводника по направлению тока, и согнуть остальные пальцы, то они будут огибать проводник в направлении линий магнитной поля (см. рис.1).
Рис.1а. Магнитное поле проводника с током.
Если вместо одиночного витка проводника мы используем многовитковую катушку (соленоид), поля, генерируемые витками, складываются в более сильное, равномерно распределённое однородное магнитное поле. Линии этого поля ориентированы практически параллельно центральной оси соленоида. Таким образом работают электромагниты.
Рис. 1б. Магнитное поле соленоида.
В простейшем варианте, поворотные двигатели постоянного тока состоят из неподвижного элемента (статора) и вращающегося элемента (ротора — якоря двигателя постоянного тока).
И хотя на практике существует множество вариаций, включая вращающийся статор и неподвижный якорь, для упрощения понимания в данной статье мы будем подразумевать цилиндрический внутренний ротор и внешний статор, генерирующий магнитное поле за счет постоянных магнитов.
Мы рассмотрим электродвигатель, приводимый в движение за счет взаимного воздействия полей, генерируемых ротором и статором.
От теории к практике — как создать электродвигатель
Каким образом применить имеющиеся знания к созданию реального двигателя? Давайте начнем с простого примера — двухполюсного коллекторного двигателя постоянного тока. Такой мотор включает в себя ротор (якорь) и статор, сформированным двумя разнополюсными постоянными магнитами.
Якорь состоит из свободно вращающейся перекладины (рамки), установленной на центральный стержень, который в свою очередь установлен на подшипниках, прикрепленных к корпусу двигателя. Вместо рассмотренного ранее одиночного витка возьмем проводник и обернем его вокруг якоря несколько раз, чтобы сформировать обмотку с обеих сторон, но в разных направлениях.
В результате при подключении проводника к источнику питания две обмотки создадут электромагнитные поля с противоположными полярностями.
Магнит можно рассматривать как собрание дипольных моментов, направленных в одну сторону. Подобная модель применима как к постоянным магнитам, так и электромагнитам. Магнитное поле вызывает усилие, направленное по вектору дипольных моментов соленоида. Другими словами, когда мы помещаем якорь в магнитное поле, индуцированное магнитами статора, это поле создает усилие и генерирует момент, вызывающий вращение якоря относительно своей центральной оси.
Рис.2. Схематичное изображение двухполюсного двигателя постоянного тока.
Приведенная простая модель имеет некоторые проблемы. Хотя сила остается постоянной при условии неизменности силы тока и магнитного поля, момент меняется как функция угла поворота θ. Так как якорь двигателя стремится повернуться таким образом, чтобы выровнять полюса обмотки в соответствии с полюсами статора, значение угла θ и sin(θ) падает, в конечном счете приводя момент к нулю.
С практической стороны это означает, что якорь останавливается, когда его полюса выравниваются с полюсами магнитов статора. Имея существеннную массу, якорь может проскользнуть положение идеального выравнивания полюсов, но в этом случае образуется отрицательный момент, который вызовет движение в обратную сторону.
Возникнет колебание вокруг положения равновесия, и в конечном итоге остановка.
В любом случае, запомним, что направление силы, возникающей по действием магнитного поля, будет определяться направлением тока. Это означает, что реверсирование направления тока в проводнике вызовет реверс действия силы и позволит магнитному полю опять создать момент.
Если мы сможем переключить направление тока в момент, когда виток достигнет перпендикулярного положения, то сразу после того, как он отклонится далее под действием силы инерции мимо перпендикулярного положения, поле статора заставит виток поворачиваться далее, генерируя крутящий момент (рис.2).
Таков принцип работы двигателя постоянного тока.
Чтобы заставить работать подобную модель, мы должны найти способ изменять направление тока в проводнике. В случае двигателя постоянного тока мы можем осуществить такое преключение добавив в электрический контур коммутатор (преключатель, или коллекторный узел), который будет переключать направление тока.
Такой коммутатор состоит из разомкнутого кольца, закрепленного на оси якоря таким образом, чтобы оно двигалось вместе с осью якоря и соединялось с обмотками двигателя (рис.3). Чтобы подключить коммутатор к источнику питания используются щетки. Фактически эти элементы не являются щетками, это пластины из проводящего материала (в большинстве случаев графитовые, но иногда используются также и золотые или серебряные).
Эти пластины закрепляются напротив коммутатора с помощью плоских пружин. При повороте якоря двигателя направление тока изменяется на противоположное через каждые 180°, позволяя двигателю продолжать вращение.
Рис.3. Коллектор двигателя постоянного тока
Во второй части статьи «Коллекторные двигатели постоянного тока — реализация моделей» рассмотрены варианты моделей двигателей — их преимущества и недостатки в зависимости от конструктивных исполнений. В частности, рассмотрены отличия двухполюсного и трехполюсного коллекторных двигателей.
Источник: http://brushmotor.ru/article-brush-dc-motor-basics.html
Реверс электродвигателя постоянного тока независимого возбуждения по цепи якоря
При реверсе машины постоянного тока по якорной цепи магнитный поток электродвигателя остается неизменным. Направление электромагнитного момента машины меняется благодаря изменению знака тока якоря, что в свою очередь приводит к изменению направления вращения. Реверс тока якоря может быть осуществлен с помощью контактного реверсора, тиристорного (диодного) нереверсивного преобразователя и контактного реверсора, а также с помощью двухкомплектного тиристорного преобразователя.
Электроприводы постоянного тока с контактными реверсорами дешевле вентильных, так как они не требуют дополнительного комплекта вентилей. Однако в случае применения такой системы к электроприводам с частыми реверсами их преимущество быстро сходит на нет, так как двухкомплектные тиристорные преобразователи, в отличии от реверсоров, не требуют частого технического обслуживания и замены механических контактных частей. Срок службы их при правильной эксплуатации значительно больше.
Схема с контактным реверсором
Ниже показана структурная схема тиристорного электропривода, в которой реверс осуществляется с помощью контактного реверсора:
В данном случае величина сигнала задания скорости и его полярность будет определять скорость и направление вращения электродвигателя. Выходной сигнал регулятора скорости будет задающим для регулятора тока.
При получении команды на реверс на вход регулятора тока придёт сигнал довольно большой амплитуды, который будет ограничен токоограничивающим звеном, которое не позволит тиристорному преобразователю превысит максимально допустимый ток машины (или ток максимальной уставки).
При наличии сигнала «вперед» будут замкнуты одни контакты реверсора, а при получении сигнала «назад» они должны переключиться, однако это будет сделано не сразу. При получении команды «назад» система управления сначала снимает управляющие импульсы с тиристорного преобразователя, снижая тем самым ток в цепи до нуля.
Датчик нулевого тока определяет, достиг ли ток в цепи нуля. Если он достиг нуля – произойдет переключение контактов реверсора. Это необходимо для предотвращения электрической дуги в цепи контактного реверсора, чем способствует более длительной его работе.
На рисунке ниже показаны диаграммы напряжений и токов процесса реверса скорости, изменяющиеся от номинальных значений в прямом направлении до тех же номинальных значений, но уже в обратном направлении:
Предполагается, что электродвигатель работает на холостом ходу (не нагружен). Процесс реверса проходит с током, не превышающим заданного значения, поэтому и развиваемый электрической машиной момент будет ограничен.
Если пренебречь потерями на вентиляцию и потерями в подшипниках, то скорость будет меняться по линейному закону, уменьшившись сначала до нуля, а потом увеличившись до установившегося значения.
В случае линейной зависимости момента сопротивления на валу машины от скорости ее вращения, последняя при реверсе будет изменяться по закону экспоненты, как и показано на графике.
При реверсе электромагнитный момент двигателя может быть выражен как:
Уравнение движения для вала электрической машины имеет вид:
Решив (2) относительно скорости получим:
Где, τм = J/B – электромеханическая постоянная времени электропривода, А – постоянная интегрирования.
Примем за базовое начальное значение угловой скорости:
Подставим это значение в (3):
Откуда определим постоянную интегрирования:
Уравнение экспоненциального изменения скорости электродвигателя при реверсе определяем из (3) и (5):
Из представленной на рисунке (рис. б)) выше диаграммы скорости, напряжений и токов можно сделать вывод, что реверс происходит в три этапа.
Установившийся режим вращения в прямом направлении
В момент времени t1 происходит вращение вала электрической машины в прямом направлении. Замкнуты контакты В (вперед) контактного реверсора и, через эти контакты, от тиристорного преобразователя к электродвигателю протекает ток якоря Iя.
Ранее упоминалось, что электродвигатель работает на холостом ходу, поэтому для преодоления моментов сопротивлений вентиляции и трения в подшипниках требуется незначительный ток, которым в машинах большой мощности часто пренебрегают и считают его равным нулю.
Реверс скорости
В момент времени t2 приходит задающий сигнал на смену направления вращения и в этот момент начинается цикл реверса. Управляющие импульсы с тиристоров снимаются или тиристорный преобразователь переводится в инверторный режим (в зависимости от выполнения системы управления).
Ток якоря снижается до нуля, та как ЭДС электродвигателя становится больше, чем выходное напряжение преобразователя. Датчик нулевого тока, установленный в якорную цепь электродвигателя, воздействует на релейную схему управления, и она переключает контакты реверсора.
Процесс переключения (вначале размыкаются контакты В, а потом замыкаются Н – это необходимо для предотвращения возможных коротких замыканий) происходит в течении 50 – 100 мс. На интервале t3 — t4 двигатель не подключен к питающему напряжению и его вращение происходит по инерции.
Если принять во внимание, что механическая инерционность электрической машины относительно велика, то можно считать, что скорость вращения машины на этом участке постоянна.
После срабатывания контактора Н машина вновь подключается к преобразователю. В случае, когда тиристорный преобразователь переведен в инверторный режим, начнется торможение электродвигателя с постоянным Iя и с отдачей энергии в сеть, то есть рекуперативное торможение.
Двигатель тормозится и, в момент времени t5 скорость его станет равной нулю. На интервале торможения t4 – t5 угол управления тиристорами постоянно меняется для поддержания постоянного значения Iя. ЭДС и скорость электрической машины станут равными нулю в момент времени t5.
Далее, угол управления тиристорами изменяется для поддержания необходимой интенсивности разгона при этом, не превышая допустимый ток, а электродвигатель продолжает разгоняться уже в обратном направлении.
В момент времени t6 скорость выходит на установившийся уровень. Iя становится соответствующим нагрузке, а изменение угла управления тиристорами прекращается.
Наброс нагрузки
С увеличением момента нагрузки в момент времени t7 возрастет Iя. При этом уменьшатся ЭДС двигателя, выходное напряжение преобразователя и скорость.
Осциллограммы переходных процессов в реальном электроприводе, работающем с контактным реверсором, приведены на рисунке ниже:
На осциллограмме показаны изменения скорости электропривода, Iя и выходного напряжения преобразователя при работе на холостом ходу. На осциллограмме видно, что регулятор поддерживает ток на заданном уровне в процессе реверса. Стоит также отметить и то, что продолжительность процесса реверса напрямую зависит от механической инерционности электропривода, так как время коммутации контактов реверсора относительно мало.
Приведенный пример системы электропривода позволяет несколько сэкономить затраты на силовое электрооборудование и упростить систему управления при удовлетворительном быстродействии. Однако наличие механических контактов в цепи якоря требует постоянного обслуживания.
Схема с двухкомплектным тиристорным преобразователем
Двухкомплектный тиристорный преобразователь способен обеспечить работу электропривода во всех четырех квадрантах с реверсом тока и напряжения в якорной цепи электродвигателя. Данная схема строится на бесконтактных элементах, что обеспечивает ее надежность и быстродействие. В таких схемах могут использоваться тиристорные преобразователи как с раздельным управлением, так и с совместным и комплексным.
В схеме с использованием двухкомплектного устройства по схеме (схема 2) оба комплекты регулируются одновременно. Через оба комплекта тиристоров постоянно протекает уравнительный ток, величина которого составляет не более 20% от полного. Поскольку один тиристорный преобразователь работает в выпрямительном режиме, а другой в инверторном реверс происходит практически мгновенно. Процессы реверса на холостом ходу приведены на рисунке ниже:
Электродвигатель будет вращаться в прямом направлении в момент времени t1. В выпрямительном режиме работает преобразователь 1 и проводит уравнительный ток и ток холостого хода. Преобразователь 2 работает в режиме инвертора и проводит только уравнительный ток, который в процессе реверса может быть принят постоянным.
Команда на реверс поступает в момент времени t2. Напряжения тиристорных преобразователей изменится таким образом, что Iя останется ограниченным заданным значением. В процессе реверса этот ток начинает протекать через второй комплект вентилей, который отдает энергию в сеть. Таким образом, электрическая машина работает в режиме рекуперативного торможения, ее скорость уменьшается и достигается момент времени t3.
С момента времени t3 второй комплект вентилей переходит в выпрямительный режим работы и разгоняет электродвигатель в обратном направлении, а первый комплект вентилей (преобразователь 1) переходит в инверторный режим работы и пропускает только уравнительный ток.
Скорость электрической машины достигает установившегося значения в момент времени t4 и Iя уменьшается до значения тока холостого хода.
К валу двигателя прикладывается нагрузка в момент времени t5.
Если используется система с раздельным управлением углом открывания тиристоров (схема 3) уравнительные реакторы отсутствуют. При таком режиме управления работает только одна группа вентилей, а вторая в этот момент закрыта. Во избежание появления возможных короткозамкнутых контуров при реверсе электропривода, после снятия управляющих импульсов с преобразователя 1, выдерживается бестоковая пауза (как правило, до 20 мс), которая начинается в момент срабатывания датчика нулевого тока.
Источник: https://elenergi.ru/revers-elektrodvigatelya-postoyannogo-toka-nezavisimogo-vozbuzhdeniya-po-cepi-yakorya.html
Н-мост и схема работы для управления двигателями
В различных электронных схемах часто возникает необходимость менять полярность напряжения, прикладываемого к нагрузке, в процессе работы. Схемотехника таких устройств реализуется с помощью ключевых элементов. Ключи могут быть выполнены на переключателях, электромагнитных реле или полупроводниковых приборах. Н-мост на транзисторах позволяет с помощью управляющих сигналов переключать полярность напряжения поступающего на исполнительное устройство.
Что такое Н-мост
H-мост
В различных электронных игрушках, некоторых бытовых приборах и робототехнике используются коллекторные электродвигатели постоянного тока, а также двухполярные шаговые двигатели.
Часто для выполнения какого-либо алгоритма нужно с помощью электрического сигнала быстро поменять полярность питающего напряжения с тем, чтобы двигатель технического устройства стал вращаться в противоположную сторону. Так робот-пылесос, наткнувшись на стену, мгновенно включает реверс и задним ходом отъезжает от препятствия.
Такой режим реализуется с помощью Н-моста. Схема Н-моста позволяет так же изменять скорость вращения электродвигателя. Для этого на один из двух ключей подаются импульсы от широтно-импульсного модулятора (ШИМ).
Схемой управления режимами двигателя является h-мост. Это несложная электронная схема, которая может быть выполнена на следующих элементах:
- Биполярные транзисторы
- Полевые транзисторы
- Интегральные микросхемы
Основным элементом схемы является электронный ключ. Принципиальная схема моста напоминает латинскую букву «Н», отсюда название устройства. В схему входят 4 ключа расположенных попарно, слева и справа, а между ними включена нагрузка.
H-мост
На схеме видно, что переключатели должны включаться попарно и по диагонали. Когда включен 1 и 4 ключ, электродвигатель вращается по часовой стрелке. 2 и 3 ключи обеспечивают работу двигателя в противоположном направлении. При включении двух ключей по вертикали слева или справа произойдёт короткое замыкание. Каждая пара по горизонтали закорачивает обмотки двигателя и вращения не произойдёт. На следующем рисунке проиллюстрировано, что происходит, когда мы меняем положение переключателей:
Схема работы H-моста
Если мы заменем в схеме переключатели на транзисторы, то получим такой вот (крайне упрощенный) вариант:
H-мост
Для того чтобы исключить возможное короткое замыкание h-мост на транзисторах дополняется входной логикой, которая исключает появление короткого замыкания. В современных электронных устройствах мостовые схемы изменения полярности дополняются устройствами, обеспечивающими плавное и медленное торможение перед включением реверсного режима.
Н-мост на биполярных транзисторах
Транзисторы в ключевых схемах работают по принципу вентилей в режиме «открыт-закрыт», поэтому большая мощность на коллекторах не рассеивается, и тип применяемых транзисторов определяется, в основном, питающим напряжением. Несложный h-мост на биполярных транзисторах можно собрать самостоятельно на кремниевых полупроводниковых приборах разной проводимости.
H-мост на биполярных транзисторах
Такое устройство позволяет управлять электродвигателем постоянного тока небольшой мощности. Если использовать транзисторы КТ816 и КТ817 с индексом А, то напряжение питания не должно превышать 25 В.
Аналогичные транзисторы с индексами Б или Г допускают работу с напряжением до 45 В и током не превышающим 3 А. Для корректной работы схемы транзисторы должны быть установлены на радиаторы. Диоды обеспечивают защиту мощных транзисторов от обратного тока.
В качестве защитных диодов можно использовать КД105 или любые другие, рассчитанные на соответствующий ток.
Недостатком такой схемы является то, что нельзя подавать на оба входа высокий потенциал, так как открытие обоих ключей одновременно вызовет короткое замыкание источника питания. Для исключения этого в интегральных мостовых схемах предусматривается входная логика, полностью исключающая некорректную комбинацию входных сигналов.
Схему моста можно изменить, поставив в неё более мощные транзисторы.
Н-мост на полевых транзисторах
Кроме использования биполярных транзисторов в мостовых схемах управления питанием, можно использовать полевые (MOSFET) транзисторы. При выборе полупроводниковых элементов обычно учитывается напряжение, ток нагрузки и частота переключения ключей, при использовании широтно-импульсной модуляции.
Когда полевой транзистор работает в ключевом режиме, у него присутствуют только два состояния – открыт и закрыт. Когда ключ открыт, то сопротивление канала ничтожно мало и соответствует резистору очень маленького номинала. При подборе полевых транзисторов для ключевых схем следует обращать внимание на этот параметр. Чем больше это значение, тем больше энергии теряется на транзисторе.
При минимальном сопротивлении канала выше КПД моста и лучше его температурные характеристики.
Дополнительным негативным фактором является зависимость сопротивления канала от температуры. С увеличением температуры этот параметр заметно растёт, поэтому при использовании мощных полевых транзисторов следует предусмотреть соответствующие радиаторы или активные схемы охлаждения.
Поскольку подбор полевых транзисторов для моста связан с определёнными сложностями, гораздо лучше использовать интегральные сборки. В каждой находится комплементарная пара из двух мощных MOSFET транзисторов, один из которых с P каналом, а другой с N каналом.
Внутри корпуса также установлены демпферные диоды, предназначенные для защиты транзисторов.
В конструкции использованы следующие элементы:
- VT 1,2 – IRF7307
- DD 1 – CD4093
- R 1=R 2= 100 ком
Интегральные микросхемы с Н-мостом
В ключах Н-моста желательно использовать комплементарные пары транзисторов разной проводимости, но с одинаковыми характеристиками. Этому условию в полной мере отвечают интегральные микросхемы, включающие в себя один, два или более h-мостов.
Такие устройства широко применяются в электронных игрушках и робототехнике. Одной из самых простых и доступных микросхем является L293D. Она содержит два h-моста, которые позволяют управлять двумя электродвигателями и допускают управление от ШИМ контроллера.
Микросхема имеет следующие характеристики:
- Питание – + 5 В
- Напряжение питания электромотора – + 4,5-36 В
- Выходной номинальный ток – 500 мА
- Ток в импульсе – 1,2 А
Микросхема L298 так же имеет в своём составе два h-моста, но гораздо большей мощности. Максимальное напряжение питания, подаваемое на двигатель, может достигать + 46 В, а максимальный ток соответствует 4,0 А.
Н-мост TB6612FNG допускает подключение двух коллекторных двигателей или одного шагового. Ключи выполнены на MOSFET транзисторах и имеют защиту по превышению температуры, перенапряжению и короткому замыканию. Номинальный рабочий ток равен 1,2 А, а максимальный пиковый – 3,2 А.
Максимальная частота широтно-импульсной модуляции не должна превышать 100 кГц.
Мостовые устройства управления электродвигателями часто называют драйверами. Драйверами так же называют микросхемы, только обеспечивающие управление мощными ключевыми каскадами. Так в схеме управления мощным электродвигателем используется драйвер HIP4082.
Он обеспечивает управление ключами, собранными на дискретных элементах. В них используются MOSFET транзисторы IRF1405 с N-каналами. Компания Texas Instruments выпускает большое количество интегральных драйверов предназначенных для управления электродвигателями разных конструкций.
К ним относятся:
- Драйверы для шаговых двигателей – DRV8832, DRV8812, DRV8711
- Драйверы для коллекторных двигателей – DRV8816, DRV8848, DRV8412/32
- Драйверы для бесколлекторных двигателей – DRV10963, DRV11873, DRV8332
На рынке имеется большой выбор интегральных мостовых схем для управления любыми электродвигателями. Сделать конструкцию можно и самостоятельно, применив качественные дискретные элементы.
Источник: https://arduinomaster.ru/uroki-arduino/shema-raboty-n-mosta-dlya-upravleniya-dvigatelyami/
Реверс электродвигателя — полное описание функций реверсирования
Реверс – это изменение направления вращения электродвигателя. Выполнить реверс можно изменив полярность приходящего на пускатель, питающего напряжения. Это могут быть регуляторы, используемые для двигателей постоянного тока.
Реверс можно выполнить, используя перемену чередования фаз в сети переменного тока. Это действие выполняется в автоматическом режиме при замене полярности сигнала задания, или после поступления определенной команды на нужный логический вход.
Реверс можно осуществить при помощи информации, которая передается по полевой шине, эта возможность входит в определенный набор стандартных функциональных способностей и свойственна большинству современных регуляторов, используемых в цепях переменного тока.
Рис№1. Тезус U(магнитный пускатель) с реверсивным блоком
Функция реверсирования
Для изменения направления двигателя изменяется полярность напряжения приходящего на якорь двигателя.
Основные методы реверсирования
В настоящее время, уже достаточно редко, используется контакторный способ.
Существует статический способ, он заключается в изменении полярности на выходе преобразователя в обмотке якоря или при изменении направления прохождения тока возбуждения. Для этого способа свойственно наличие большой постоянной времени обмотки возбуждения, что не всегда удобно.
Рис. №2. Реверсирование двигателя с помощью магнитного пускателя.
При управляемом торможении механизмов, обладающих высоким моментом инерции нагрузки, необходимо вырабатываемую электрической машиной энергию, возвращать обратно в основную электрическую сеть.
Используя процесс торможения регулятор выступает в качестве инвертора, производимая энергия обладает отрицательным зарядом.. таким образом регулятор может осуществить две операции одна – реверс, другая – рекуперативное торможение. Регулятор оснащается двумя мостами, которые подключены встречно-параллельно.
Используемые мосты инвертируют напряжение и ток.
Рис.№3. Реверс асинхронного электродвигателя с прямым частотным преобразователем; а) скорость и составляющие вектора статорных токов АД, б) фазные напряжения электрической сети и ток нагрузки.
Реверс может осуществляться преобразователем частоты, используемым для асинхронных электрических двигателей.
Управление реверсированием выполняется с помощью векторного управления в замкнутой системе с использованием датчика обратной связи. С его помощью производится независимое управление составляющими тока Id и Iq, они служат для определения потока и вращающегося момента двигателя. Управление асинхронным двигателем аналогично проведению операций по управлению и регулированию двигателем постоянного тока.
Рис.№4. Функциональная схема регулятора скорости с векторным управлением и датчиком обратной связи.
Для осуществления функции реверса, на логическом входе регулятора предназначенного для выполнения этой команды появляется внешний сигнал. Он изменяет порядок коммутации силовых ключей инвертора и реверса двигателя. Реверс можно выполнять в нескольких вариантах.
- Вариант №1: осуществление действия с помощью противовключения, при стремительном изменении очередности переключения транзисторных ключей.
При изменении чередования фаз на двигателе, находящемся в работе, происходит изменение вращения поля. В результате этого появляется большое скольжение, что создает резко-нарастающее тока ПЧ (преобразователя частоты) до самого большого значения (внутреннее ограничение тока ПЧ).
При большом скольжении малый тормозной момент и внутренний регулятор ПЧ уменьшат задание скорости. При достижении электродвигателем нулевой скорости, происходит осуществление реверса, который соответствует кривой разгона.
Лишняя энергия, не затраченная на трение и на нагрузку, рассеивается в роторе.
- Вариант №2: изменение направления вращения электрического поля с управлением периода скорости замедления и без него.
Вращающий момент механизма прямо противоположен моменту двигателя и превышает его по модулю, то есть естественное замедление происходит быстрее во много раз, чем кривая замедления, которую установил регулятор. Значение скорости постепенно снижается и происходит смена направления вращения.
При вращающем моменте, когда естественное торможение меньше установленного регулятором, двигатель начинает работать в состоянии рекуперативного торможения и возвращает энергию преобразователю. Диодные мосты не дают энергии пройти в сеть, конденсаторы фильтра заряжаются, величина напряжения увеличивается и включается устройство безопасности, предохраняющее от выделения энергии.
Для того чтобы предотвратить перенапряжение, через тормозной ключ присоединяют тормозное сопротивление к конденсаторному блоку. Тормозной момент ограничивается емкостью в звене постоянного тока преобразователя, значение скорости падает и происходит смена вращения. Разные модификации резисторов на разные номиналы обеспечивают соответствие мощности двигателя и рассеиваемой энергии. В подавляющем большинстве случаев тормозной ключ в моделях расположен в самом регуляторе.
Наличие тормозного резистора свойственно для регуляторов, предназначенных для обеспечения управляемого торможения, этот метод относится к самым экономически выгодным. С его помощью двигатель может замедлять вращение до самой остановки движения, не меняя направление рабочего вращения.
- Вариант №3: длительный период работы в режиме торможения.
Этот вариант характерен для испытательных стендов. Выделяющаяся энергия обладает слишком большой величиной, резисторы не могут справиться с ее рассеиванием, потому что произойдет повышение температуры.
Для этого предусмотрены системы, которые дают возможность вернуть энергию обратно в электрическую сеть. В этом случае диодный мост не используется, вместо него применяют полупроводниковый мост, изготовленный из IGBT-транзисторов.
Выполнение рабочих функций определено с помощью многоуровневого управления, оно дает возможность получить токовую характеристику, приближенную к форме чистого синуса.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад если вы найдете на моем сайте еще что-нибудь полезное.
Источник: https://elektronchic.ru/elektrotexnika/revers-elektrodvigatelya.html
Схема реверса электродвигателя
Схема реверса электродвигателя при напряжении сети 220(В) и при напряжении цепей управления 220(В)
Хочу сразу заметить, что следует обращать внимание на уровень напряжение питания электродвигателя (380В или 220В) и напряжение катушек контакторов (380В и 220В).
Ниже смотрите еще 2 схемы реверса электродвигателя с разными номинальными напряжениями.
Схема реверса электродвигателя при напряжении сети 380(В) и при напряжении цепей управления 380(В)
Схема реверса электродвигателя при напряжении сети 380(В) и при напряжении цепей управления 220(В)
В моем примере уровень напряжения силовой цепи составляет 220(В), поэтому контакторы я использую с катушками, соответственно, на 220 (В).
Контакторы КМ1 и КМ2 используем для организации реверса электродвигателя. При срабатывании контактора КМ1 фазировка питающего напряжения будет различаться от фазировки при срабатывании контактора КМ2.
Управление катушками контакторов КМ1 и КМ2 осуществляется кнопками «стоп», «вперед» и «назад».
Давайте рассмотрим принцип работы схемы реверса электродвигателя.
Принцип работы схемы реверса
При нажатии кнопки «вперед» получает питание катушка контактора КМ1 по цепи: фаза С — н.з. контакт кнопки «стоп» — н.з. контакт КМ2.2 контактора КМ2 — н.о. контакт нажатой кнопки «вперед» — катушка контактора КМ1 — фаза В.
Контактор КМ1 подтягивается и замыкает свои силовые контакты КМ1.1. Двигатель начинает вращаться в прямом направлении.
Кнопку «вперед» держать не нужно, т.к. катушка контактора КМ1 встает на «самоподхват» через свой же контакт КМ1.3.
Н.о. — нормально-открытый контакт, н.з. — нормально-закрытый контакт
Для остановки электродвигателя используем кнопку «стоп». Контактами этой кнопки мы разрываем питание катушки («самоподхват») контактора КМ1. Катушка КМ1 теряет питание и контактор КМ1 отпадывает, отключая электродвигатель от сети.
При нажатии кнопки «назад» получает питание катушка контактора КМ2 по цепи: фаза С — н.з. контакт кнопки «стоп» — н.з. контакт КМ1.2 контактора КМ1 — н.о. контакт нажатой кнопки «назад» — катушка контактора КМ2 — фаза В.
Контактор КМ2 подтягивается и замыкает свои силовые контакты КМ2.1. Двигатель начинает вращаться в обратном направлении.
Кнопку «назад» держать не нужно, т.к. катушка контактора КМ2 встает на «самоподхват» через свой же контакт КМ2.3.
В этой схеме выполнена блокировка кнопок от одновременного нажатия, иначе в силовой цепи возникнет короткое замыкание, которое приведет к повреждению электрооборудования. Блокировка выполняется последовательным включением н.з. контакта (блок-контакта) соответствующего контактора.
Силовая цепь схемы реверса электродвигателя снабжена защитным коммутационным вводным автоматическим выключателем АП-50 с номинальным током 4(А). Также желательно выполнить защиту и цепи управления, путем установки автоматических выключателей или предохранителей на фазу В и С.
В примере (видео) защита цепей управления отсутствует.
Существуют заводские сборные контакторы для схем реверса электродвигателя с механической блокировкой в виде перекидного рычажка, который блокирует одновременное включение контакторов.
Если у Вас однофазный двигатель, то схемы приведенные в данной статье не подойдут. Переходите по ссылке, чтобы узнать более подробно о реверсе однофазного двигателя.
В комментариях регулярно пишут, что в данной статье не в полном объеме раскрыта сборка схемы реверса. Исправляюсь и представляю Вашему вниманию пошаговую инструкцию по сборке схемы реверса асинхронного двигателя (переходите по ссылочке). Прочитав эту инструкцию, Вы самостоятельно соберете схему реверса электродвигателя.
Источник: http://zametkielectrika.ru/revers-elektrodvigatelya/
Виды электродвигателей
Электрика »Электрооборудование »Электродвигатели
ПЕРЕМЕННОГО ТОКА
ПОСТОЯННОГО
Одним из основных стимулов к широкой электрификации, начавшейся в XX веке, стала возможность легкого преобразования энергии электрического тока в механическую — к тому времени уже был известен коллекторный электродвигатель, изобретенный Якоби еще в первой половине XIX века.
Изобретение асинхронного двигателя переменного тока стало еще большим шагом вперед.
Электромотор лишился механически трущихся и искрящих узлов (щеток и коллектора), превзойдя по бесшумности и ресурсу любой другой существовавший в то время тип привода.
Независимо от конструкции, любой электродвигатель устроен одинаково: внутри цилиндрической проточки в неподвижной обмотке (статоре) вращается ротор, в котором возбуждается магнитное поле, приводящее к отталкиванию его полюсов от статора.
Поддержание постоянного отталкивания требует:
- перекоммутации обмоток ротора, как это делается на коллекторных электродвигателях;
- создания вращающегося магнитного поля в самом статоре (классический пример – асинхронный трехфазный двигатель).
Достоинства электродвигателей переоценить трудно. Это:
Крайняя простота.
Электродвигатель состоит из минимального количества узлов, поэтому ломаться в нем практически нечему.
Самостоятельный запуск.
Электродвигателю не нужен пусковой импульс, он начинает вращаться сам при включении питания (исключение – однофазные электродвигатели с пусковой обмоткой, но они практически вышли из употребления). Это позволяет отказаться от холостого хода, включая электромотор только при необходимости.
Отсутствие вибраций.
Так как в электродвигателях энергия магнитного поля непосредственно преобразуется во вращение, при должной балансировке ротора они полностью бесшумны и не создают вибрации.
Легкость управления оборотами и крутящим моментом.
Несмотря на то, что на разных типах электродвигателей это достигается разными способами, управление ими в любом случае достаточно просто и надежно.
Возможность реверса.
На коллекторном двигателе достаточно поменять местами полюса якоря, на трехфазном электромоторе – изменить порядок включения фаз.
Обратимость.
Коллекторные электродвигатели при внешнем приводе начинают работать как электрогенераторы, что позволяет использовать их для рекуперации энергии при торможении электротранспорта.
Электродвигатели переменного тока
Благодаря удобству передачи на большие расстояния и легкости преобразования переменный ток успешно стал стандартом электроснабжения.
В сфере же производства электродвигателей его способность возбуждать переменное магнитное поле в статоре и соответственно индуцировать ток в короткозамкнутой обмотке ротора позволила создать асинхронные электродвигатели. В этом типе двигателей единственным испытывающим трение узлом остаются коренные подшипники якоря.
Ротор такого электродвигателя – это металлический цилиндр, в пазы которого под углом к оси вращения запрессованы или залиты токопроводящие жилы, на торцах ротора объединенные кольцами в одно целое. Переменное магнитное поле статора возбуждает в роторе, напоминающем беличье колесо, противоток и, соответственно, отталкивающее его от статора магнитное поле.
В зависимости от числа обмоток статора асинхронный двигатель может быть:
Однофазным – в этом случае главным недостатком двигателя становится невозможность самостоятельного запуска, так как вектор силы отталкивания проходит строго через ось вращения.
Для начала работы двигателю необходим или стартовый толчок, или включение отдельной пусковой обмотки, создающей дополнительный момент силы, смещающий их суммарный вектор относительно оси якоря.
Двухфазный электродвигатель имеет две обмотки, в которых фазы смещены на угол, соответствующий геометрическому углу между обмотками. В этом случае в электродвигателе создается так называемое вращающееся магнитное поле (спад напряженности поля в полюсах одной обмотки происходит синхронно с нарастанием его в другой).
Такой двигатель становится способным к самостоятельному запуску, однако имеет трудности с реверсом. Поскольку в современном электроснабжении не используются двухфазные сети, фактически электродвигатели этого рода применяются в однофазных сетях с включением второй фазы через фазовращающий элемент (обычно – конденсатор).
Трехфазный асинхронный электродвигатель – наиболее совершенный тип асинхронного мотора, так как в нем появляется возможность легкого реверса – изменение порядка включения фазных обмоток изменяет направление вращения магнитного поля, а соответственно и ротора.
Коллекторные двигатели переменного тока используются в тех случаях, когда требуется получение высоких частот вращения (асинхронные электродвигатели не могут превышать скорость вращения магнитного потока в статоре – для промышленной сети 50 Гц это 3000 об/мин).
Кроме того, они выигрывают в пусковом крутящем моменте (здесь он пропорционален току, а не оборотам) и имеют меньший пусковой ток, меньше перегружая электросеть при запуске. Также они позволяют легко управлять своими оборотами.
Обратной стороной этих достоинств становится дороговизна (требуется изготовление ротора с наборным сердечником, несколькими обмотками и коллектором, который к тому же сложнее балансировать) и меньший ресурс. Помимо необходимости в регулярной замене стирающихся щеток, со временем изнашивается и сам коллектор.
Синхронный электродвигатель имеет ту особенность, что магнитное поле ротора индуцируется не магнитным полем статора, а собственной намоткой, подключенной к отдельному источнику постоянного тока.
Благодаря этому частота его вращения равна частоте вращения магнитного поля статора, откуда и происходит сам термин «синхронный».
Как и двигатель постоянного тока, синхронный двигатель переменного тока является обратимым:
- при подаче напряжения на статор он работает как электродвигатель;
- при вращении от внешнего источника он сам начинает возбуждать в фазных обмотках переменный ток.
Основная область использования синхронных электродвигателей – высокомощные приводы. Здесь увеличение КПД относительно асинхронных электромоторов означает значительное снижение потерь электроэнергии.
Также синхронные двигатели используются в электротранспорте. Однако, для управления скоростью в этом случае требуются мощные частотные преобразователи, зато при торможении возможен возврат энергии в сеть.
Электродвигатели постоянного тока
Так как постоянный ток не способен создать изменяющееся магнитное поле, обеспечение непрерывного вращения ротора требует принудительной перекоммутации обмоток, или дискретного изменения направления магнитного поля.
Старейший из известных способов – это использование электромеханического коллектора. В этом случае якорь электродвигателя имеет несколько разнонаправленных обмоток, соединенных с находящимися в соответствующем положении относительно щеток ламелями коллектора.
В момент включения питания возникает импульс в обмотке, соединенной со щетками, после чего ротор проворачивается, и в том же месте относительно полюсов статора включается новая обмотка.
Так как намагниченность статора во время работы коллекторного электродвигателя постоянного тока не изменяется, вместо сердечника с обмотками могут использоваться мощные постоянные магниты, что сделает мотор компактнее и легче.
Коллекторный двигатель не лишен ряда недостатков. Это:
- высокий уровень помех, как передаваемых в питающую сеть при переключении обмоток якоря, так и возбуждаемых искрением щеток;
- неизбежный износ коллектора и щеток;
- повышенная шумность при работе.
Современная силовая электроника позволила избавиться от этих недостатков, применяя так называемый шаговый двигатель – в нем ротор имеет постоянную намагниченность, а внешнее устройство последовательно меняет направление тока в нескольких обмотках статора.
Фактически за единичный импульс тока ротор проворачивается на фиксированный угол (шаг), откуда и пошло название электромоторов такого типа.
Шаговые электродвигатели бесшумны, а также позволяют в широчайших пределах регулировать как крутящий момент (амплитудой импульсов), так и обороты (частотой), а также легко реверсируются изменением порядка следования сигналов.
По этой причине они широко используются в сервоприводах и автоматике, однако их максимальная мощность определяется возможностями силовой управляющей схемы, без которой шаговые двигатели неработоспособны.
2012-2020 г. Все права защищены.
Представленные на сайте материалы имеют информационный характер и не могут быть использованы в качестве руководящих и нормативных документов
Источник: https://eltechbook.ru/jelektrodvigateli_vidy.html
Трехфазный асинхронный двигатель
Дмитрий Левкин
Трехфазный асинхронный электродвигатель, как и любой электродвигатель, состоит из двух основных частей — статора и ротора. Статор — неподвижная часть, ротор — вращающаяся часть. Ротор размещается внутри статора. Между ротором и статором имеется небольшое расстояние, называемое воздушным зазором, обычно 0,5-2 мм.
Статор состоит из корпуса и сердечника с обмоткой. Сердечник статора собирается из тонколистовой технической стали толщиной обычно 0,5 мм, покрытой изоляционным лаком. Шихтованная конструкция сердечника способствует значительному снижению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. Обмотки статора располагаются в пазах сердечника.
Ротор состоит из сердечника с короткозамкнутой обмоткой и вала. Сердечник ротора тоже имеет шихтованную конструкцию. При этом листы ротора не покрыты лаком, так как ток имеет небольшую частоту и оксидной пленки достаточно для ограничения вихревых токов.
Принцип работы. Вращающееся магнитное поле
Принцип действия трехфазного асинхронного электродвигателя основан на способности трехфазной обмотки при включении ее в сеть трехфазного тока создавать вращающееся магнитное поле.
Вращающееся магнитное поле — это основная концепция электрических двигателей и генераторов.
Вращающееся магнитное поле асинхронного электродвигателя
Частота вращения этого поля, или синхронная частота вращения прямо пропорциональна частоте переменного тока f1 и обратно пропорциональна числу пар полюсов р трехфазной обмотки.
,
- где n1 – частота вращения магнитного поля статора, об/мин,
- f1 – частота переменного тока, Гц,
- p – число пар полюсов
Концепция вращающегося магнитного поля
Чтобы понять феномен вращающегося магнитного поля лучше, рассмотрим упрощенную трехфазную обмотку с тремя витками. Ток текущий по проводнику создает магнитное поле вокруг него. На рисунке ниже показано поле создаваемое трехфазным переменным током в конкретный момент времени
Составляющие переменного тока будут изменяться со временем, в результате чего будет изменяться создаваемое ими магнитное поле. При этом результирующее магнитное поле трехфазной обмотки будет принимать разную ориентацию, сохраняя при этом одинаковую амплитуду.
Магнитное поле создаваемое трехфазным током в разный момент времени Ток протекающий в витках электродвигателя (сдвиг 60°)
Вращающееся магнитное поле
Теперь разместим замкнутый проводник внутри вращающегося магнитного поля. По закону электромагнитной индукции изменяющееся магнитное поле приведет к возникновению электродвижущей силы (ЭДС) в проводнике. В свою очередь ЭДС вызовет ток в проводнике. Таким образом, в магнитном поле будет находиться замкнутый проводник с током, на который согласно закону Ампера будет действовать сила, в результате чего контур начнет вращаться.
Влияние вращающегося магнитного поля на замкнутый проводник с током
Короткозамкнутый ротор асинхронного двигателя
По этому принципу также работает асинхронный электродвигатель. Вместо рамки с током внутри асинхронного двигателя находится короткозамкнутый ротор по конструкции напоминающий беличье колесо. Короткозамкнутый ротор состоит из стержней накоротко замкнутых с торцов кольцами.
Короткозамкнутый ротор «беличья клетка» наиболее широко используемый в асинхронных электродвигателях (показан без вала и сердечника)
Трехфазный переменный ток, проходя по обмоткам статора, создает вращающееся магнитное поле. Таким образом, также как было описано ранее, в стержнях ротора будет индуцироваться ток, в результате чего ротор начнет вращаться.
На рисунке ниже Вы можете заметить различие между индуцируемыми токами в стержнях. Это происходит из-за того что величина изменения магнитного поля отличается в разных парах стержней, из-за их разного расположения относительно поля.
Изменение тока в стержнях будет изменяться со временем.
Вы также можете заметить, что стержни ротора наклонены относительно оси вращения. Это делается для того чтобы уменьшить высшие гармоники ЭДС и избавиться от пульсации момента. Если стержни были бы направлены вдоль оси вращения, то в них возникало бы пульсирующее магнитное поле из-за того, что магнитное сопротивление обмотки значительно выше магнитного сопротивления зубцов статора.
Скольжение асинхронного двигателя. Скорость вращения ротора
Отличительный признак асинхронного двигателя состоит в том, что частота вращения ротора n2 меньше синхронной частоты вращения магнитного поля статора n1.
Объясняется это тем, что ЭДС в стержнях обмотки ротора индуцируется только при неравенстве частот вращения n2
Источник: https://engineering-solutions.ru/motorcontrol/induction3ph/